Jerbot - a biomimetic bipedal robot
Motivation:
Building cyber-physical systems that are mobile and robust has been one of mankind’s unsolved challenges. In our project, we are trying to explore an unconventional design for a biped robot devised from a desert rodent called Jerboa. This little rodent has come under the limelight of the scientific community in recent years. Jerboa’s robust and unpredictable gait is considered a viable fix to the problems we face with the current humanoid type biped design. We are currently using Reinforcement learning techniques to make the agent learn complex gait sequences by itself and bring out new ways of locomotion achievable that even we humans are unaware of. This project’s sole motive is to make individual units that can be extensively deployed in areas that are quite hazardous and unreachable for humans. We aim to make these robots as cheap as possible so that they are compromisable in extreme conditions like in recovery missions, space exploration, etc.
Jerbot Version 1: 2019-20
-
Formulated an alternate design for addressing the problem of biped locomotion, mimicking the agile and superiorlocomotion skills ofJerboa.Fabricated our first prototype and did the mechanical validation of our hardwarethroughPID control, load testing, disturbance rejection,etc.
-
Built a customOpen AI Gym environmentfor experimenting with various Deep RL algorithms to learnoptimal control strategies
Checkout the project repo [here]](https://github.com/RaISy-Net/JerBot)
Video Demo:
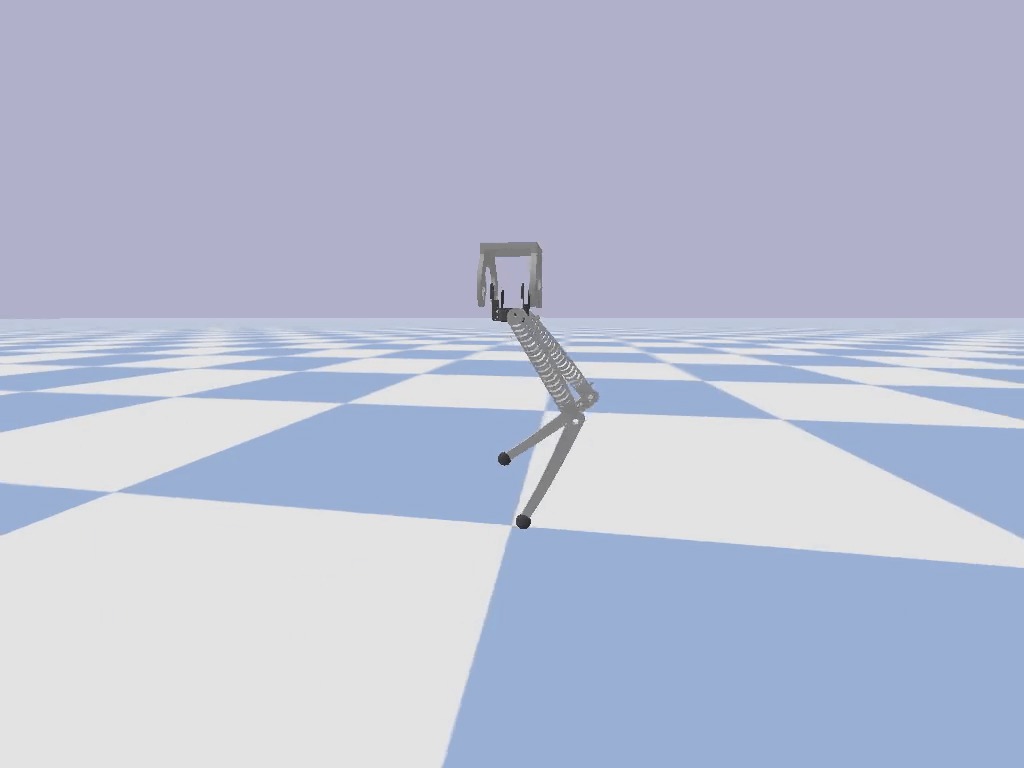
Jerbot Version 2 (a.k.a JerbotBeta): 2021-present
As a team, we are currently pursuing the second iteration of our robot named, JerbotBeta with adequate consideration given to the hardware design and development to closely resemble the Linear Inverted Pendulum, a mathematical template model to capture the essence of bipedal walking. Our current work revolves around the extension to torque control based on highly dynamic hardware design and exploring the sophisticated control techniques for agile locomotion.

Project Collaborators
- Nishant Kumar, active: 2019-20
- Niranth Sai, active: 2019-20
- Raman Raj, active: 2021-present





