Research Projects
Multipurpose Household Bot
A multi-purpose household bot with a lot of innovative features with a limited hardware which solve small day to day problems.





Gyrosphere - The Spherical Bot
A ball-shaped mobile robot with spherical external shape typically made of a spherical shell serving as the body of the robot and an internal driving unit (IDU) that enables the robot to move.



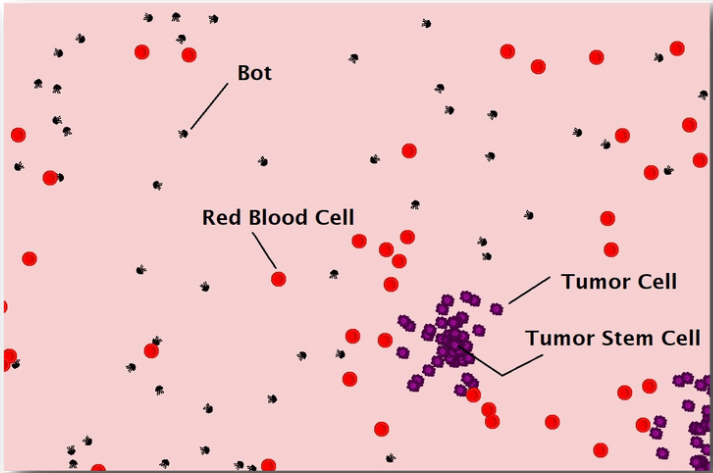
Gym Environment for Swarm Bots
Swarm robotics offers the potential to advance personalized precision medicine and cancer therapy.



Pipe Traversal Bot
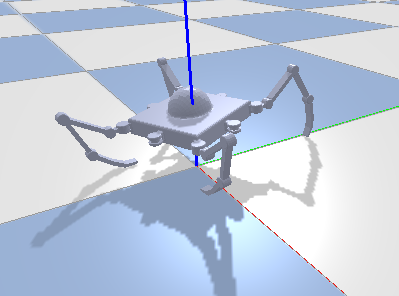
Implementation of Single and Multi-Agent Deep Reinforcement Learning Algorithms for a Walking Quadruped




3D-Occupancy-Maps-With-Quadrotors
Simulated Hector Quadrotor In Gazebo and Mapped a Unknown environment.



Jerbot - a biomimetic bipedal robot
the design, development and control of a cost-efficient bipedal robot for agile locomotion










Enhance UnderWater Imagery
Takle the brightness of the images affected by factors such as refraction and absorption, suspended particles in the water, and color distortion results in a noisy and distorted visual data.

Chase and Run
Developing a fast and robust control system for dynamic games aimed at identifying Nash equilibrium strategies and emergent behaviour in competitive settings.


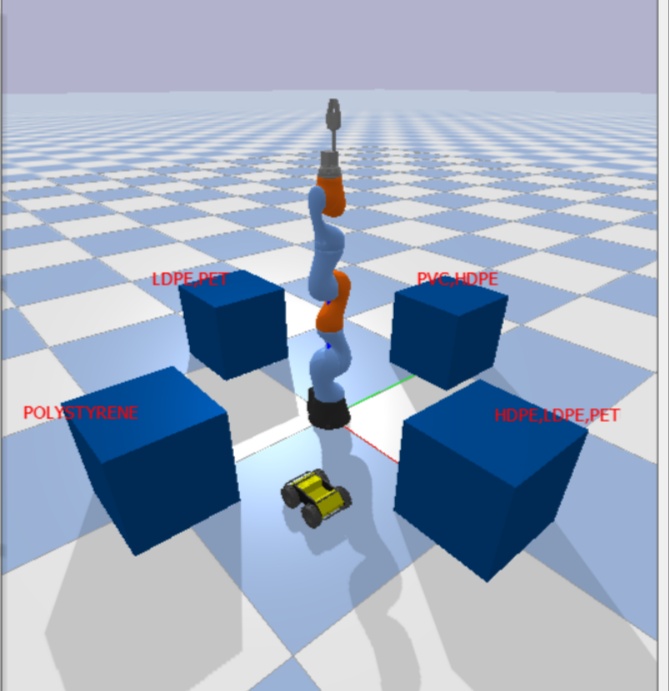
Waste Autonomous Robotics
Providing Solutions for an Autonomous Waste Management System.



Modular Robotics With Swarm Intelligence
MultiAgent RL based planner with swarm intelligance in a Modular robots setup.



Mask-On
This project includes using robots for human surveillance in shopping malls and grocery stores.




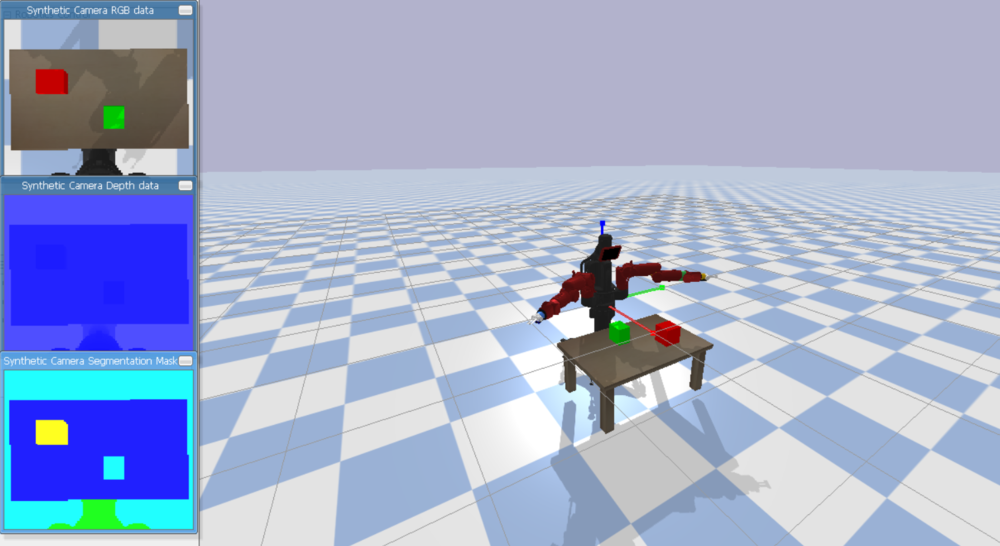
Simultaneous Multitasking Agent
Training a Robot for doing multiple tasks simultaneously like a human being, using one image frame.



