
We are the group of robotics enthusiasts that actively investigate the different domains of robotics. Our main focus is to carry out projects that are previously unthought, undone and untested through our novel approaches and rigorous experimentations. We are currently working in the domain of learning-based techniques in robot planning, control and decision making in terms of both single-agent and multi-agent settings for robotic systems. Our goal is to extend the state of art and actively contribute to the robotics community through our diverse set of projects. At present we are a part of the Robotics Club of the Science and Technology Council at IIT(BHU), and actively seek out for collaborations. Check out our projects and free feel to contact us at roboreg.iitbhu@gmail.com

News
- September 14, 2021
-
March 27, 2021
Team RoboReG organized an “open to all” talk as a part of the RoboReG Talk series, hosting Shreyansh Daftry from the NASA Jet propulsion Labratory. The talk was highly informative and threw light on the emerging potential of robotics and automation in space exploration. Check out his talk titled “AI and Robotics For Space Exploration” in Youtube.
-
March 06, 2021
Team RoboReG organized the first of its talk of RoboReG Talk series, hosting Rishabh Chadha a Robotics Graduate Student Researcher at the Worcester Polytechnic Institute. Check out his talk revolving around “Computer Vision and Robotics” in Drive Link to the Video.
-
February 09, 2021
As a student-driven research group, RoboReG met with IvLabs,VNIT, yet another student driven research group form VNIT. The session proved to be fruitful and educative as both the groups got to present their projects from various domains of robotics. We would be happy to host such sessions with fellow research groups. If intrested reach out to us at roboreg.iitbhu@gmail.com
-
October 08, 2020
Welcome to the new website for the Robotics Research Group(RoboReg), IIT(BHU), Varanasi!
Research
Multipurpose Household Bot
A multi-purpose household bot with a lot of innovative features with a limited hardware which solve small day to day problems.





Gyrosphere - The Spherical Bot
A ball-shaped mobile robot with spherical external shape typically made of a spherical shell serving as the body of the robot and an internal driving unit (IDU) that enables the robot to move.



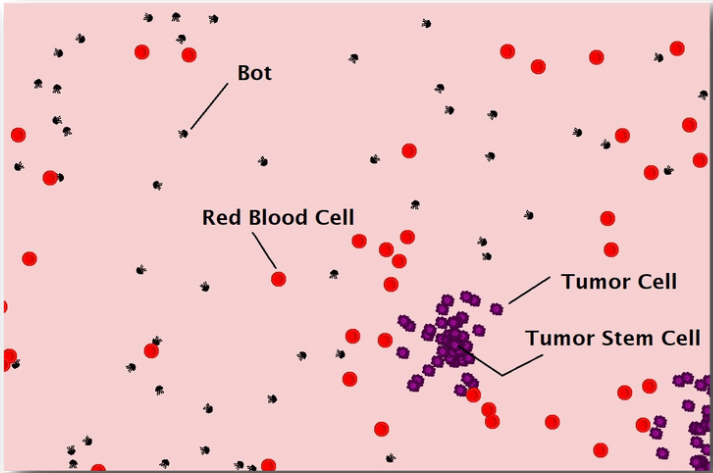
Gym Environment for Swarm Bots
Swarm robotics offers the potential to advance personalized precision medicine and cancer therapy.



Pipe Traversal Bot
Implementation of Single and Multi-Agent Deep Reinforcement Learning Algorithms for a Walking Quadruped




3D-Occupancy-Maps-With-Quadrotors
Simulated Hector Quadrotor In Gazebo and Mapped a Unknown environment.



Jerbot - a biomimetic bipedal robot
the design, development and control of a cost-efficient bipedal robot for agile locomotion










Enhance UnderWater Imagery
Takle the brightness of the images affected by factors such as refraction and absorption, suspended particles in the water, and color distortion results in a noisy and distorted visual data.

Chase and Run
Developing a fast and robust control system for dynamic games aimed at identifying Nash equilibrium strategies and emergent behaviour in competitive settings.


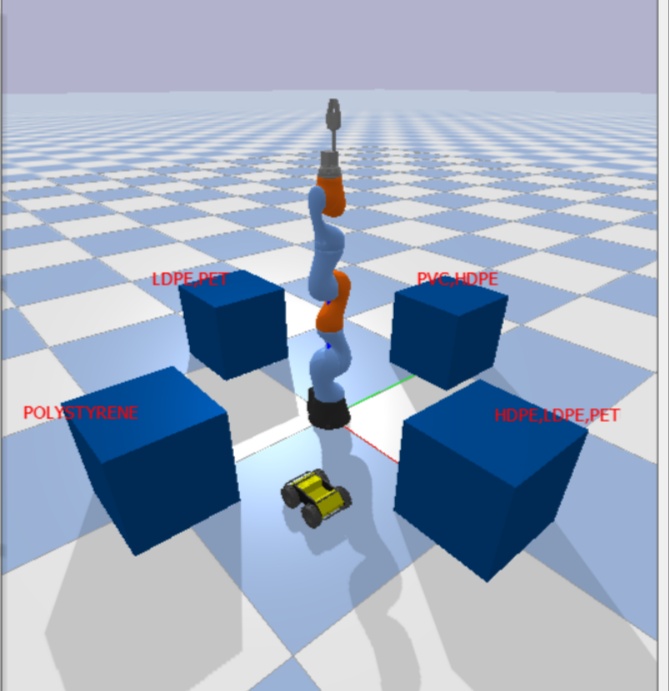
Waste Autonomous Robotics
Providing Solutions for an Autonomous Waste Management System.



Modular Robotics With Swarm Intelligence
MultiAgent RL based planner with swarm intelligance in a Modular robots setup.



Mask-On
This project includes using robots for human surveillance in shopping malls and grocery stores.




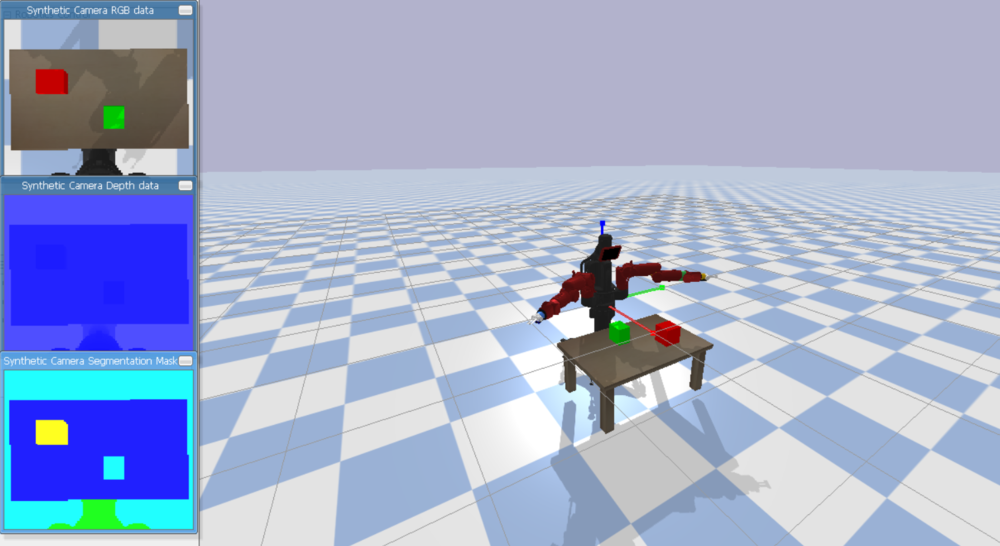
Simultaneous Multitasking Agent
Training a Robot for doing multiple tasks simultaneously like a human being, using one image frame.



